 |
Edinburgh Speech Tools
2.1-release
|


|
|
Edinburgh Speech Tools
2.1-release
|
|
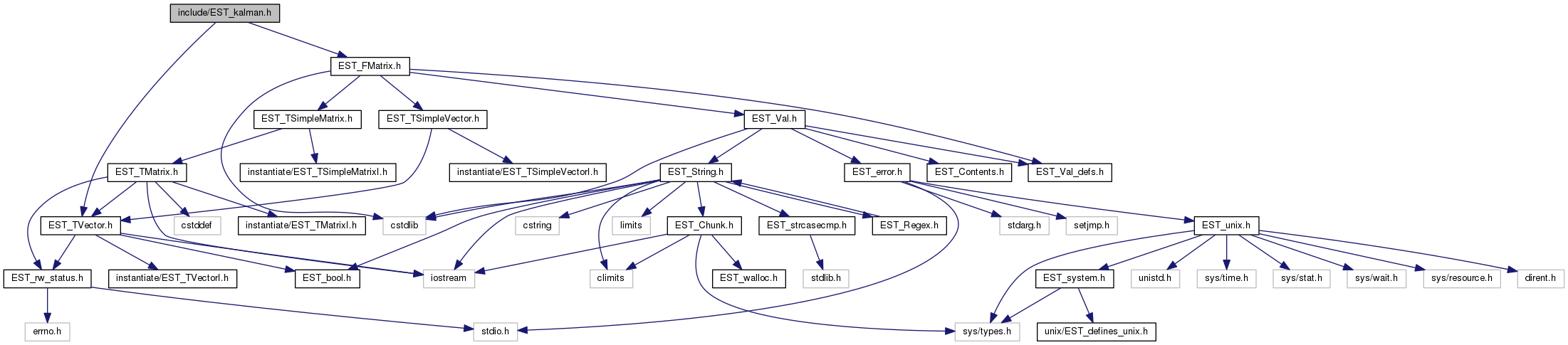
Go to the source code of this file.
Functions | |
| bool | kalman_filter (EST_FVector &x_state, EST_FMatrix &P_estimate_error_covariance, EST_FMatrix &Q_process_noise_covariance, EST_FMatrix &R_measurement_noise_covariance, EST_FMatrix &A_state_time_step_model, EST_FMatrix &H_state_to_measurement_model, EST_FVector &z_measurement) |
| bool | kalman_filter_Pinv (EST_FVector &x_state, EST_FMatrix &Pinv_estimate_error_covariance_inverse, EST_FMatrix &Q_process_noise_covariance, EST_FMatrix &Rinv_measurement_noise_covariance_inverse, EST_FMatrix &A_state_time_step_model, EST_FMatrix &H_state_to_measurement_model, EST_FVector &z_measurement) |
| bool kalman_filter | ( | EST_FVector & | x_state, |
| EST_FMatrix & | P_estimate_error_covariance, | ||
| EST_FMatrix & | Q_process_noise_covariance, | ||
| EST_FMatrix & | R_measurement_noise_covariance, | ||
| EST_FMatrix & | A_state_time_step_model, | ||
| EST_FMatrix & | H_state_to_measurement_model, | ||
| EST_FVector & | z_measurement | ||
| ) |
Definition at line 58 of file EST_kalman.cc.
| bool kalman_filter_Pinv | ( | EST_FVector & | x_state, |
| EST_FMatrix & | Pinv_estimate_error_covariance_inverse, | ||
| EST_FMatrix & | Q_process_noise_covariance, | ||
| EST_FMatrix & | Rinv_measurement_noise_covariance_inverse, | ||
| EST_FMatrix & | A_state_time_step_model, | ||
| EST_FMatrix & | H_state_to_measurement_model, | ||
| EST_FVector & | z_measurement | ||
| ) |
Definition at line 124 of file EST_kalman.cc.
 1.8.11
1.8.11